No Category
Start: 01.10.2024 End: 31.03.2026 Website: – VibroSense Bio-inspired tactile sensor for robotics – Vibration based dynamical tactile sensing Tactile sensors are vital for many robotic […]

Member of the Bundestag Dr Anna Christmann visits Leibniz Universität Hannover and learns about DATIpilot project ReGaP.
No Category
Start: 01.07.2024 End: 28.02.2027 Website: https://motores.ai/ MoToRes Mobility and tourism for individual user needs and regional specifics Individual travel planning and the regional control of […]
No Category
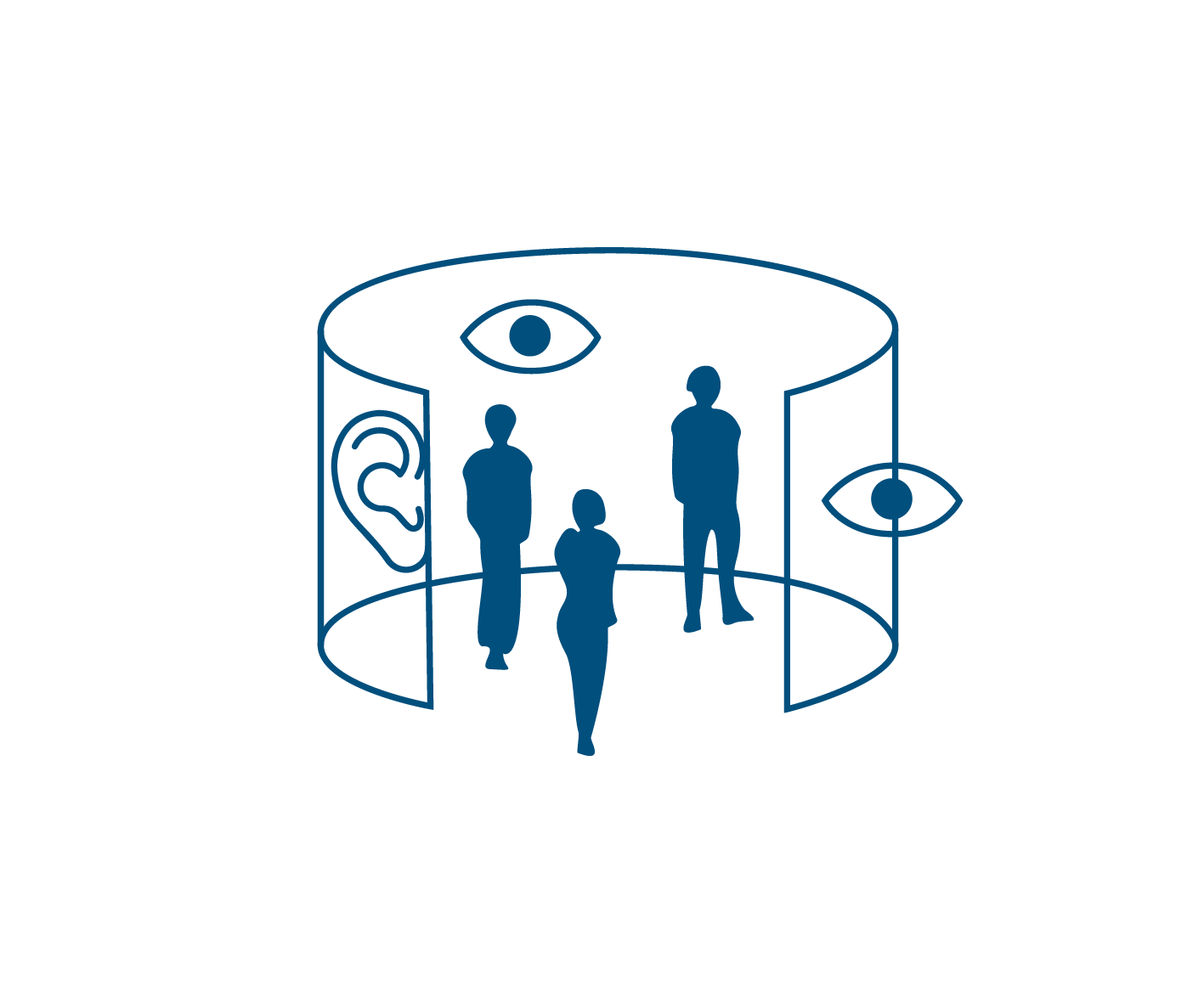
Start: 01.01.2024 End: 31.12.2026 Website: https://xtremeitu.dk/ XTREME Mixed Reality Environment for Immersive Experience of Art and Culture XTREME is an 8.0 million-euro Horizon Europe project […]
No Category
Start: 01.10.2023 End: 30.09.2026 Website: www.pearl-dna.eu PEARL-DNA Interoperable end-to-end platform of scalable and sustainable high-throughput technologies for DNA-based digital data storage Advances in artificial intelligence, […]

No Category
Start: 01.11.2023 End: 31.10.2028 Website: www.caimed.de CAIMed Lower Saxony Center for AI and Causal Methods in Medicine CAIMed is the Lower Saxony Center for Artificial […]
No Category
Start: 01.01.2024 End: 31.12.2026 Website: www.ikt.uni-hannover.de/de/fp-detail/projects/ ADINeMo Age- and Deviation-of-Information of Signal-agnostic and Signal-aware Sensor Sampling in Networked Monitoring We consider a system where a […]
No Category
Start: 01.11.2023 End: 31.10.2026 Website: PRAD Adaptive and dynamic personal guidance for self-rescue and rescue of others Detection of persons and surroundings on the basis […]
No Category
Start: 01.01.2019 End: 31.12.2026 Website: www.tu-braunschweig.de/en/se2a SE²A Consistent Multilevel Model Coupling and Knowledge Representation in Multidisciplinary Analysis and Design Project B4-2 addresses, in close collaboration […]

L3S team came together for the first Town Hall Meeting in 2024 to get to know new colleagues and projects. Best Paper Awards were presented.